Intranel created a solution to track, differentiate, and count different brands of scooters in public areas in real-time using only low-cost hardware.

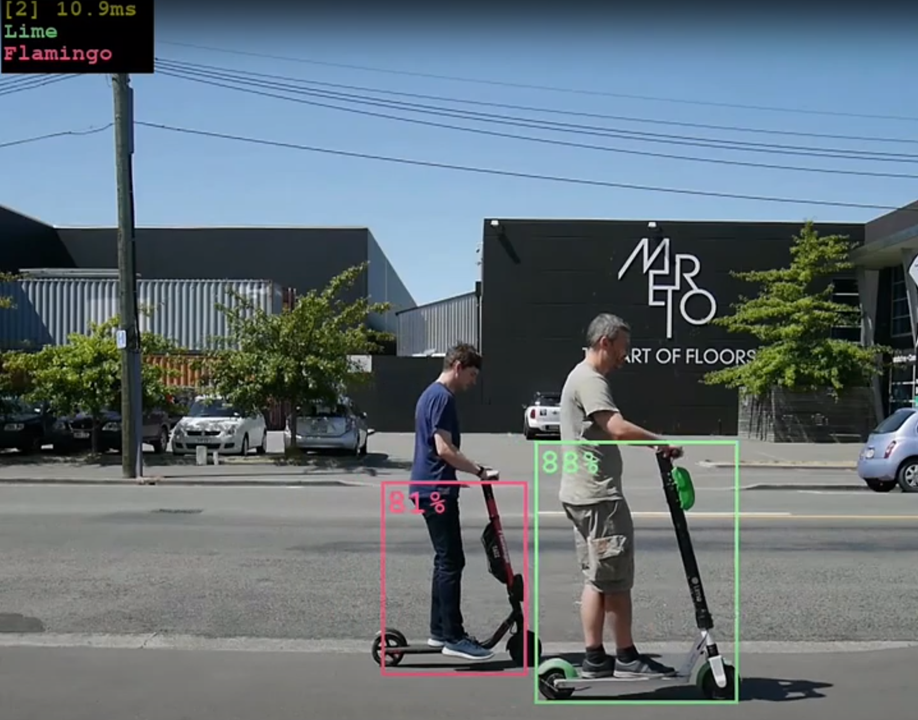
Detection, tracking, and counting had to be achieved at the local device level. We could have used a more conventional approach and send field video data to a central server for batch processing and analytics but it has several downsides:
The local processing means we only need to send small, anonymised data packets to a server. In this case, the numbers of different scooter brands crossing an area of pavement in a given time period.
The same process can easily be applied to any type of traffic—pedestrians, cyclists, cars, buses (or any mixtures of these), with data made available in real-time to upstream systems like traffic control centres.
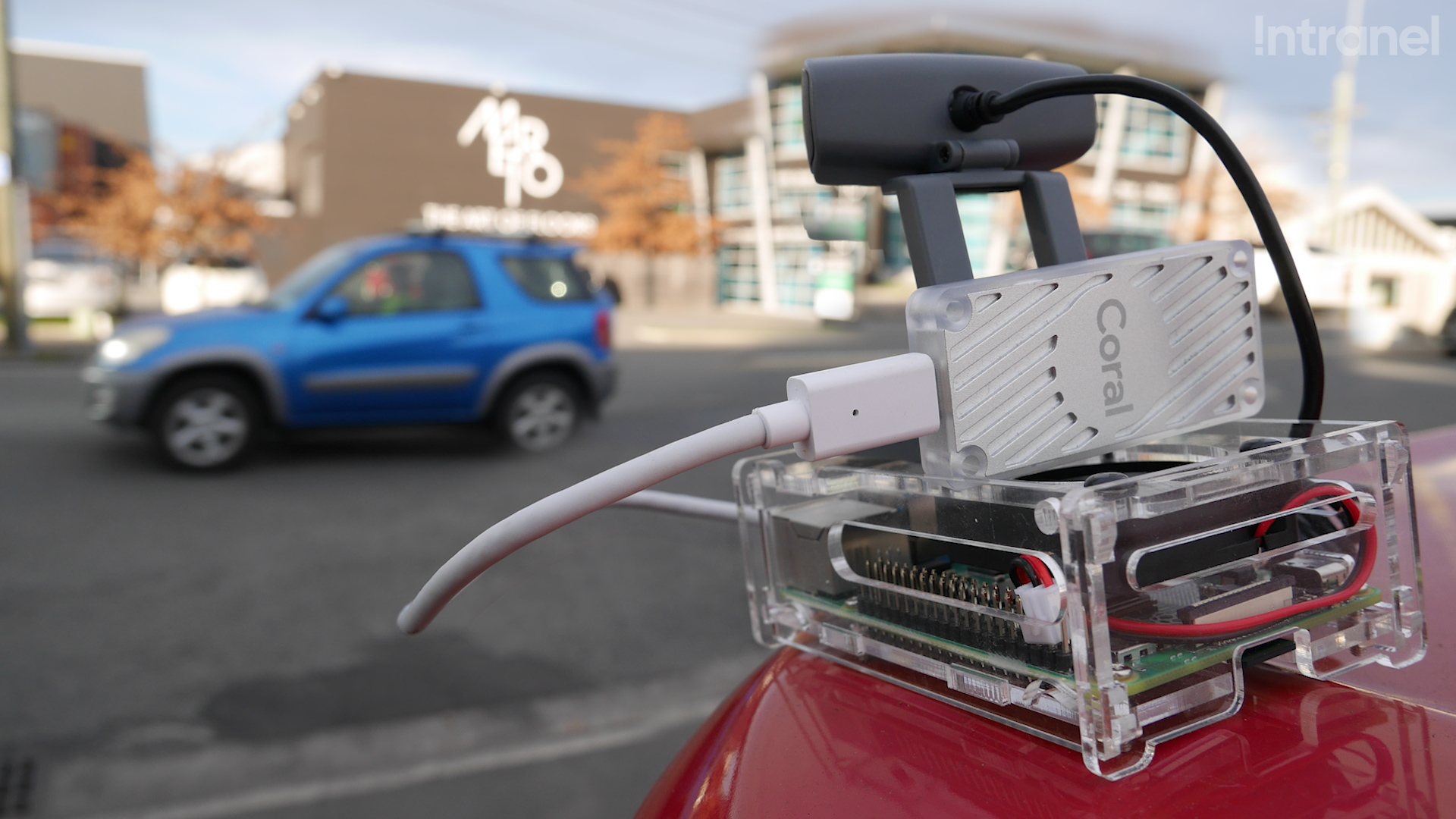
The availability of cheap, low power compute boards like Raspberry Pi, and new hardware AI accelerator modules (in this case Google’s Coral inference engine) meant we could complete all computer vision and AI tasks on the field device, under $200.
Ready to take your AI project to the next level? Get in touch with our team to get expert feedback and project estimates.
